元数据设计文档
本文档介绍 Apache Doris FE 元数据的整体架构、存储结构、数据流,以及实现细节、启动流程和宕机恢复机制。
名词解释
| 术语 | 说明 |
|---|---|
| FE | Frontend,即 Doris 的前端节点。主要负责接收和返回客户端请求、元数据以及集群管理、查询计划生成等工作。 |
| BE | Backend,即 Doris 的后端节点。主要负责数据存储与管理、查询计划执行等工作。 |
| bdbje | Oracle Berkeley DB Java Edition。在 Doris 中,使用 bdbje 完成元数据操作日志的持久化以及 FE 高可用等功能。 |
整体架构
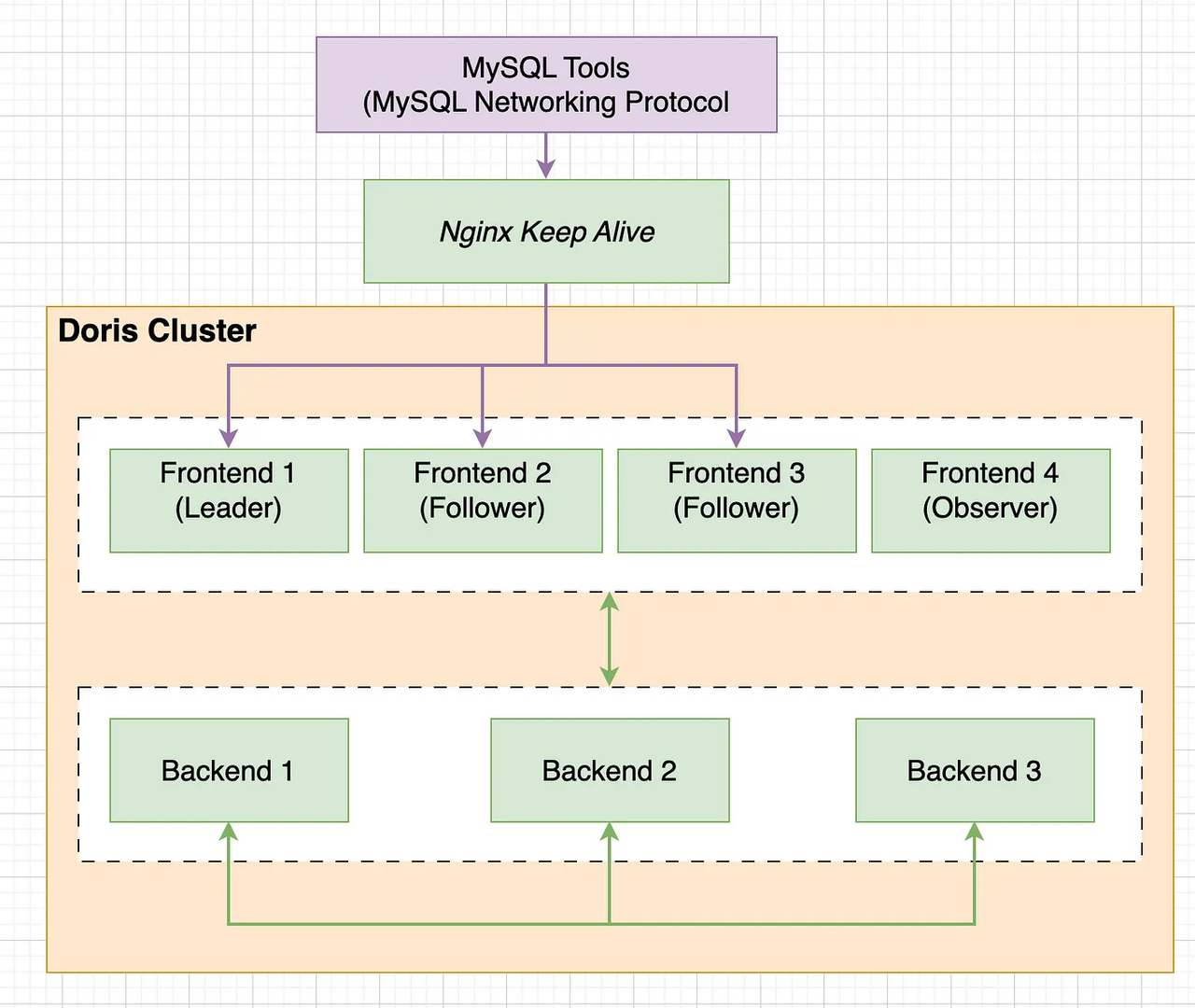
如上图,Doris 的整体架构分为两层。多个 FE 组成第一层,提供 FE 的横向扩展和高可用;多个 BE 组成第二层,负责数据存储与管理。本文主要介绍 FE 这一层中元数据的设计与实现方式。
-
FE 节点分为 follower 和 observer 两类。各 FE 之间通过 bdbje(BerkeleyDB Java Edition)进行 leader 选举、数据同步等工作。
-
follower 节点通过选举产生一个 leader,负责元数据的写入操作。当 leader 节点宕机后,其他 follower 节点会重新选举出新的 leader,保证服务的高可用。
-
observer 节点仅从 leader 同步元数据,不参与选举。可以横向扩展以提供元数据读服务的扩展性。
注:follower 和 observer 对应 bdbje 中的概念分别为 replica 和 observer。下文可能会同时使用两种名称。
元数据结构
Doris 的元数据是全内存的。每个 FE 内存中都维护一份完整的元数据镜像。在百度内部,一个包含 2500 张表、100 万个分片(300 万副本)的集群,元数据在内存中仅占用约 2 GB。(当然,查询所使用的中间对象、各种作业信息等内存开销,需要根据实际情况估算,但总体仍维持在较低的内存开销范围内。)
同时,元数据在内存中整体采用树状的层级结构存储,并通过添加辅助结构能够快速访问各层级的元数据信息。
下图是 Doris 元信息所存储的内容。
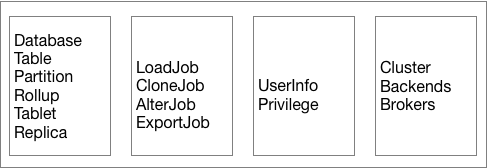
如上图,Doris 的元数据主要存储 4 类数据:
- 用户数据信息,包括数据库、表的 Schema、分片信息等。
- 各类作业信息,如导入作业、Clone 作业、SchemaChange 作业等。
- 用户及权限信息。
- 集群及节点信息。
数据流
元数据的数据流具体过程如下:
-
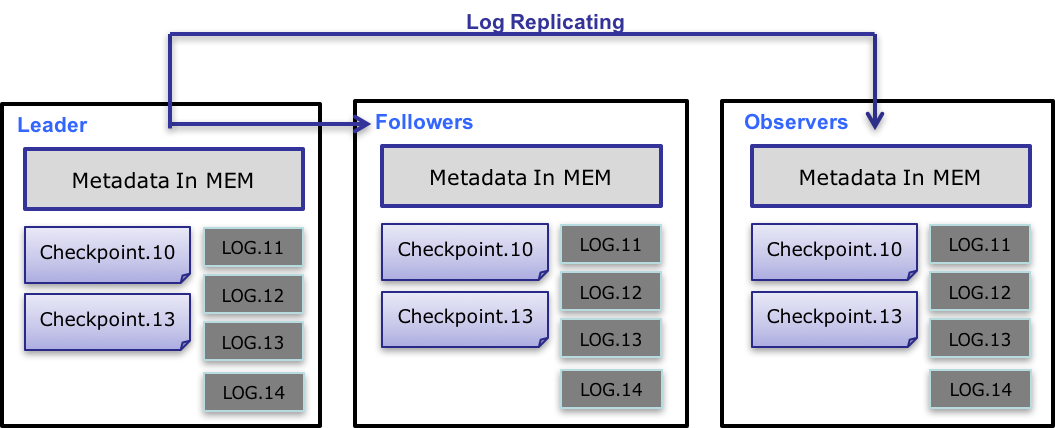
只有 leader FE 可以对元数据进行写操作。写操作在修改 leader 的内存后,会序列化为一条 log,按照 key-value 的形式写入 bdbje。其中 key 为连续的整型,作为 log id;value 即为序列化后的操作日志。
-
日志写入 bdbje 后,bdbje 会根据策略(写多数 / 全写)将日志复制到其他 non-leader FE 节点。non-leader FE 节点通过对日志回放,修改自身的元数据内存镜像,完成与 leader 节点的元数据同步。
-
当 leader 节点的日志条数达到阈值(默认 10w 条)并且满足 checkpoint 线程执行周期(默认 60 秒)时,checkpoint 会读取已有的 image 文件及其之后的日志,在内存中重新回放出一份新的元数据镜像副本,然后将该副本写入磁盘,形成一个新的 image。之所以重新生成一份镜像副本而不是直接将已有镜像写成 image,主要是因为写 image 时加读锁会阻塞写操作;因此每次 checkpoint 会占用双倍内存空间。
-
image 文件生成后,leader 节点会通知其他 non-leader 节点新的 image 已生成。non-leader 节点主动通过 HTTP 拉取最新的 image 文件,替换本地的旧文件。
-
bdbje 中的日志,在 image 完成后会定期删除旧的日志。
实现细节
元数据目录
- 元数据目录通过 FE 的配置项
meta_dir指定。 bdb/目录下为 bdbje 的数据存放目录。image/目录下为 image 文件的存放目录。
image/ 目录下的关键文件如下:
| 文件 | 说明 |
|---|---|
image.[logid] | 最新的 image 文件,后缀 logid 表明该 image 所包含的最后一条日志的 id。 |
image.ckpt | 正在写入的 image 文件。写入成功后会重命名为 image.[logid],并替换掉旧的 image 文件。 |
VERSION | 记录 cluster_id,唯一标识一个 Doris 集群。cluster_id 是 leader 第一次启动时随机生成的 32 位整型,也可以通过 FE 配置项 cluster_id 指定。 |
ROLE | 记录 FE 自身的角色,只有 FOLLOWER 和 OBSERVER 两种。FOLLOWER 表示该 FE 是一个可选举的节点(注意:即使是 leader 节点,其角色也为 FOLLOWER)。 |
启动流程
-
FE 第一次启动,如果启动脚本不加任何参数,则会尝试以 leader 的身份启动。FE 启动日志中最终会看到
transfer from UNKNOWN to MASTER。 -
FE 第一次启动,如果启动脚本中指定了
--helper参数,并且指向了正确的 leader FE 节点,那么该 FE 首先会通过 HTTP 向 leader 节点询问自身的角色(即 ROLE)和cluster_id,然后拉取最新的 image 文件。读取 image 文件、生成元数据镜像后,启动 bdbje 进行日志同步。同步完成后开始回放 bdbje 中 image 文件之后的日志,完成最终的元数据镜像生成。注 1:使用
--helper参数启动时,需要首先通过 mysql 命令在 leader 上添加该 FE,否则启动时会报错。注 2:
--helper可以指向任何一个 follower 节点,即使它不是 leader。注 3:bdbje 在同步日志过程中,FE 日志会显示
xxx detached,此时正在进行日志拉取,属于正常现象。 -
FE 非第一次启动,如果启动脚本不加任何参数,则会根据本地存储的 ROLE 信息确定自己的身份;同时根据本地 bdbje 中存储的集群信息获取 leader 的信息,然后读取本地的 image 文件以及 bdbje 中的日志,完成元数据镜像生成。(如果本地 ROLE 中记录的角色和 bdbje 中记录的不一致,则会报错。)
-
FE 非第一次启动,且启动脚本中指定了
--helper参数,则和第一次启动的流程一样,也会先去询问 leader 角色;但会和自身存储的 ROLE 进行比较,如果不一致则会报错。
元数据读写与同步
-
用户可以使用 mysql 连接任意一个 FE 节点进行元数据的读写访问。如果连接的是 non-leader 节点,则该节点会将写操作转发给 leader 节点。leader 写成功后,会返回当前最新的 log id。之后,non-leader 节点会等待自身回放的 log id 大于回传的 log id 后,才将命令成功的消息返回给客户端。该方式保证了任意 FE 节点的 Read-Your-Write 语义。
注:一些非写操作也会转发给 leader 执行,例如
SHOW LOAD。因为这些命令通常需要读取一些作业的中间状态,而这些中间状态是不写 bdbje 的,因此 non-leader 节点的内存中并不存在这些中间状态。(FE 之间的元数据同步完全依赖 bdbje 的日志回放,如果一个元数据修改操作不写 bdbje 日志,则在其他 non-leader 节点中无法看到该操作修改后的结果。) -
leader 节点会启动一个
TimePrinter线程,该线程会定期向 bdbje 中写入一个当前时间的 key-value 条目。其余 non-leader 节点通过回放这条日志,读取日志中记录的时间并与本地时间比较;如果本地时间的落后大于指定的阈值(配置项:meta_delay_toleration_second,写入间隔为该配置项的一半),则该节点会处于不可读的状态。此机制解决了 non-leader 节点在长时间和 leader 失联后,仍然提供过期元数据服务的问题。 -
各个 FE 的元数据只保证最终一致性。正常情况下,不一致的窗口期仅为毫秒级。我们保证同一 session 中元数据访问的单调一致性;但是如果同一 client 连接不同 FE,则可能出现元数据回退的现象。(对于批量更新系统,该问题影响很小。)
宕机恢复
| 场景 | 行为 |
|---|---|
| leader 节点宕机 | 其余 follower 会立即选举出一个新的 leader 节点提供服务。 |
| 多数 follower 节点宕机 | 元数据不可写入;若此时发生写请求,目前的处理流程是 FE 进程直接退出。后续会优化为在不可写状态下依然提供读服务。 |
| observer 节点宕机 | 不会影响任何其他节点的状态,也不会影响其他节点上元数据的读写。 |